
Trajectory
Post-Processing Made Simple
• Simple Command-Line Executable (exe)
• Compatible With Most Hardware
• Accurate and Affordable
• Simple Pricing for Perpetual License
A software to fuse IMU and GNSS data into accurate 3D position and orientation trajectories.
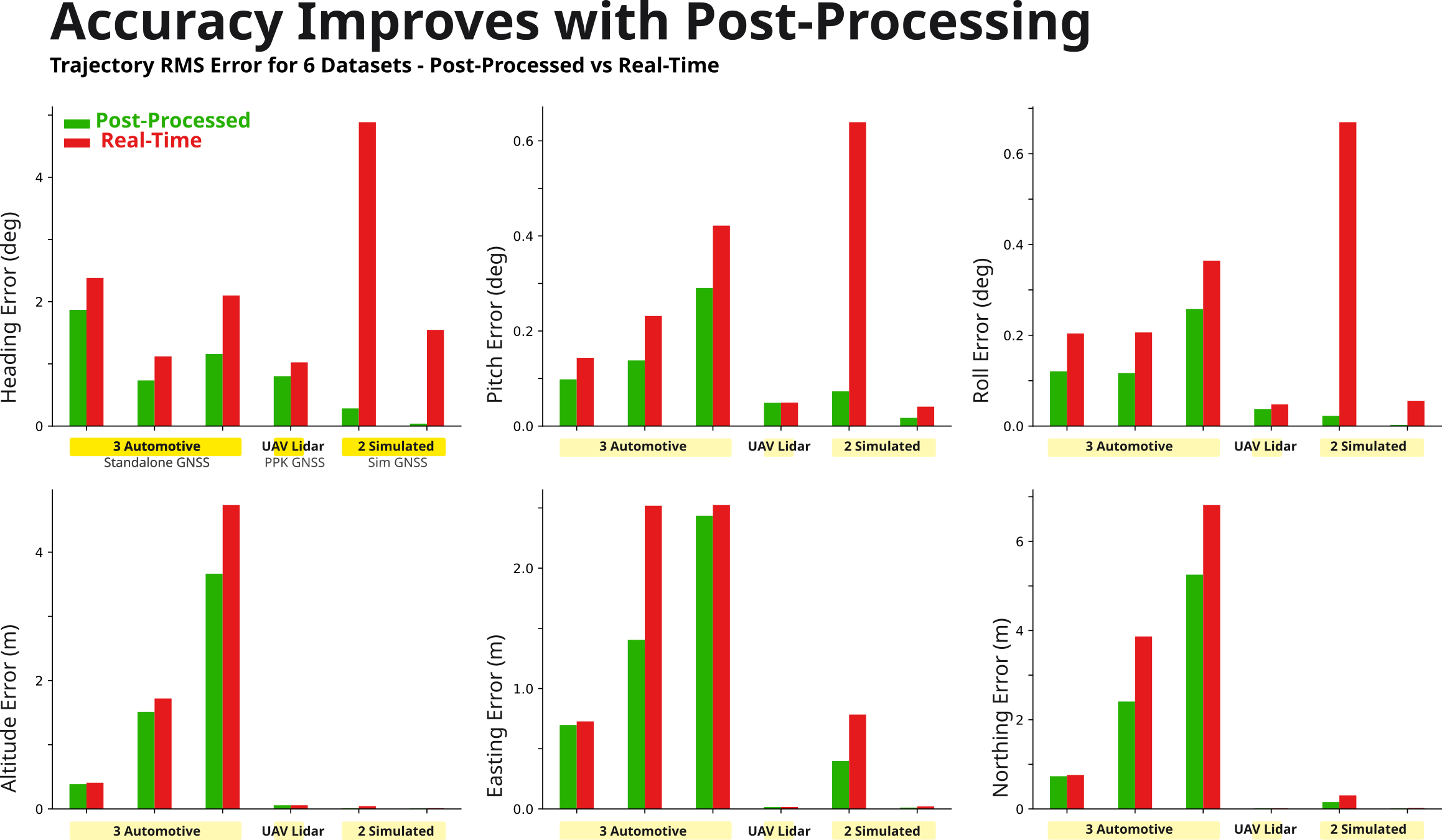
Why Post-Process?
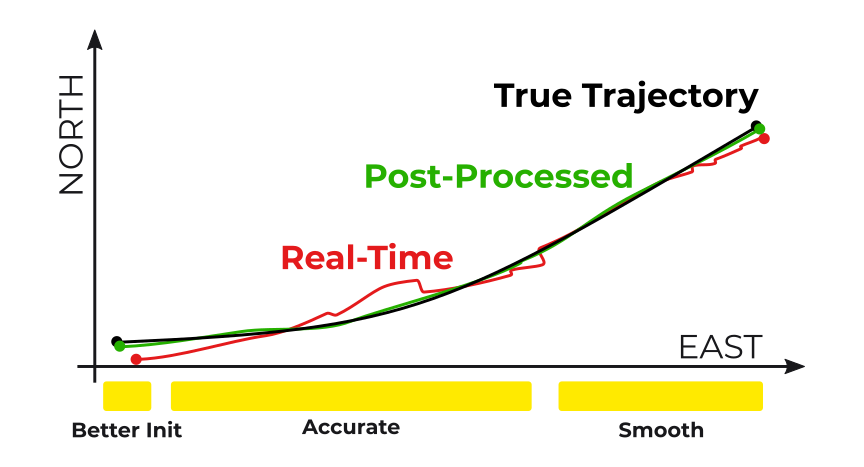
Our post-processing makes it easy to have accurate, smooth, and clean trajectories every time.
No More
❌ Throwing away chunks of data because of inaccuracy.
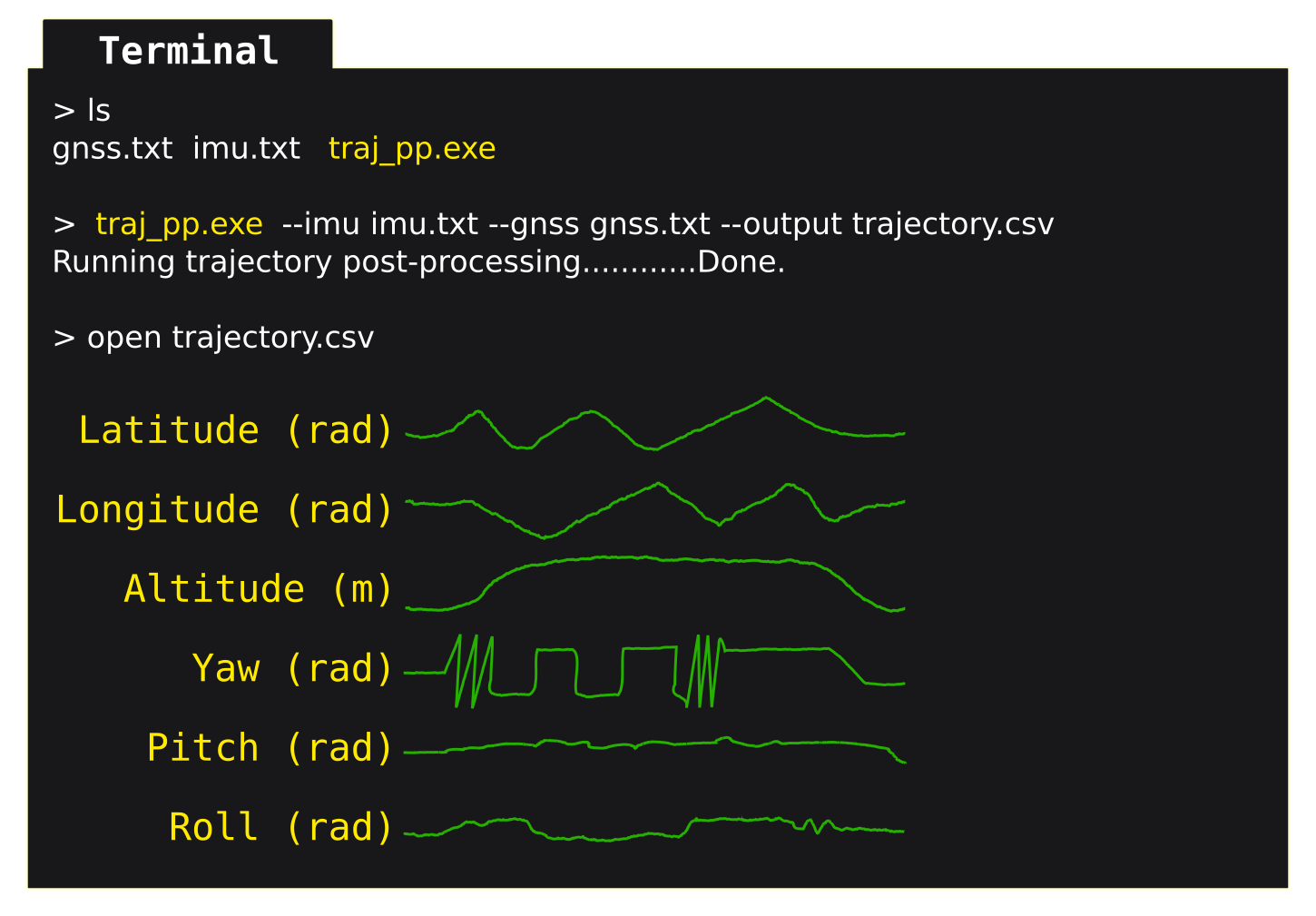
Very Easy to Use
# Open the terminal.
# Navigate to and run executable by specifying three paths:
# (1) IMU data
# (2) GNSS data
# (3) Where to save the processed trajectory
# Results will be saved as a CSV.
> traj_pp.exe --imu IMU.txt --gnss GNSSPVT.pos --output trajectory.csv
Why Use Our Solution
Other commercially available trajectory post-processing tools are designed to process raw GNSS observables, handle numerous edge cases, work with proprietary IMU data formats, and are optimized to support hardware from a particular manufacturer. These combined capabilities come with a price tag, increase the software complexity, and makes it difficult to extend to new or custom sensor hardware.
In contrast, we've focused on the most common scenarios, use GNSS position and velocity outputs (i.e. loosely coupled), leverage generic data formats, and focus on simplicity. Our post-processing solution implements a loosely-coupled GNSS/INS Kalman filter with forward-backward smoothing. The sensor fusion complexity is handled internally and the software is designed to support a broad set of sensor manufacturers. The result is an accurate and affordable trajectory post-processing tool that is simple to use.
This is For Engineers Who
✔️ Own hardware that logs both IMU and GPS/GNSS position and velocity data.
✔️ Can get their data in some kind of CSV or ASCII format.
✔️ Is comfortable opening a terminal and running an
.exe with file path arguments.This is NOT For Anyone Who
→ Our software uses a simple command-line interface.
❌ Wants a career applying advanced survey and post-processing tools.
→ Learn Inertial Explorer by NovAtel (part of Hexagon).
❌ Their device manufacturer offers post-processing software at a reasonable price.
→ If cost is an issue, our software can be a fit. Otherwise use the purpose-built software.
→ For example, SBG Systems sensors with Qinertia software, or NovAtel SPAN sensors paired with Inertial Explorer, or NAVsuite for OxTS products.
Trajectory Post-Processing Made Simple Command Line Executable (exe)
$1,000 - Perpetual License
Specifications
- Operating Sytems: Windows, Linux
- Interface: Command-Line Interface
- Hardware Compatibility: Most IMU and GNSS devices
- IMU Data: Accelerometer, Gyroscope
- GNSS Data: Position, Velocity, Time (supports standalone GNSS PVT outputs, as well as RTK and PPK results)
Partners

The GNSS/INS sensor by CTi Sensors can be used for real-time trajectory sensing. Measurements from the internal IMU and GNSS sensors can also be logged for post-processing.
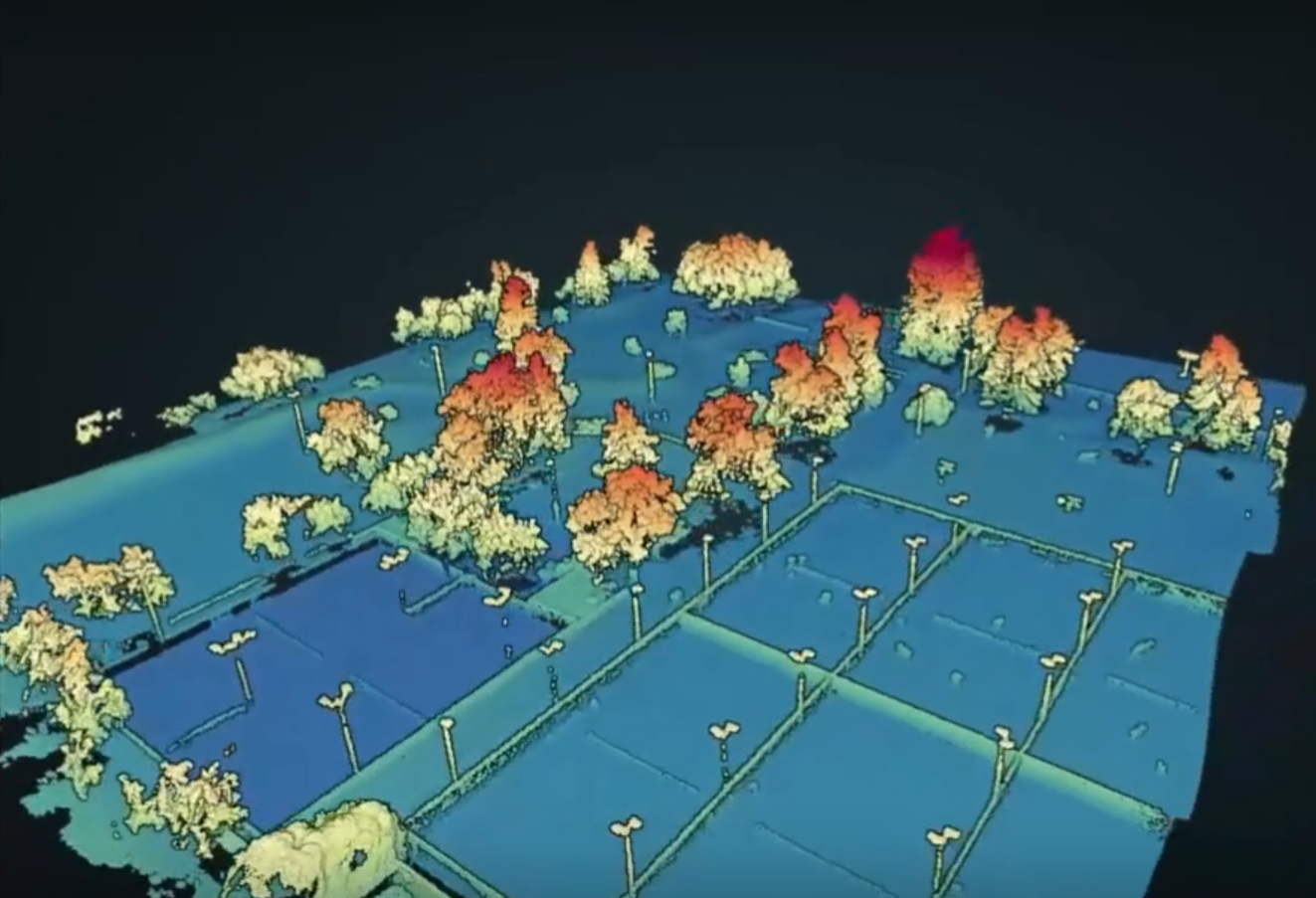
The Lidar Georeferencing software by Mad Nadir Mapping includes an integration of our trajectory post-processing software.
FAQ
What other settings are required? Is it really that easy to run?
Yes, it is that easy.
A data-loading configuration file is needed to support each new data format. This is a simple ASCII text file (see the next FAQ). That's all that is required. For most cases, it really is that simple.
Will this support ______ device?
Yes most likely.
By using generic data formats like CSV for both inputs and outputs our software is not tied to any particular device or manufacturer. We are happy to help setup the data-loading configuration file necessary to support your device. This is a simple ASCII text file. The software will then use those configurations internally to load and prepare the data to match the software requirements (e.g. rename columns, update units, drop any invalid data, etc..) .
Is this a PPK Software?
No.
PPK software is designed to load GNSS reference station data and process GNSS or GPS observables (e.g. RINEX data) into more accurate position measurements.
Our software works directly with GNSS or GPS position and velocity measurements. These measurements are fused with IMU measurements to compute 3D position and orientation trajectories.
However, our software supports any kind of GNSS position and velocity measurements. They can be standalone, SBAS aided, RTK, PPP, or PPK.
What Measurements are Required?
- Accelerometer
- Gyroscope
- GNSS position, velocity, fix status*
- Timestamps or a known sampling interval
*Fix status indicates if the GNSS measurement is valid. It may be a numerical value or simply a boolean. An estimated accuracy value, typically provided by GNSS sensors, is also useful.
Is 3D Velocity Also Available as an Output?
Yes.
In addition to 3D position and orientation, velocity is also available in north-east-down convention.