Easily process IMU data from your browser using imuengine.io
Other Names
Full scale range (FSR), input range, dynamic range, measurement range, operating range
Examples
| Device | Name | Value |
|---|---|---|
| Honeywell HG1120BA50 | Operating Range | -16 to 16g |
| CTi Sensors CS-IM100 | Range | selectable ±2, ±4, ±8g |
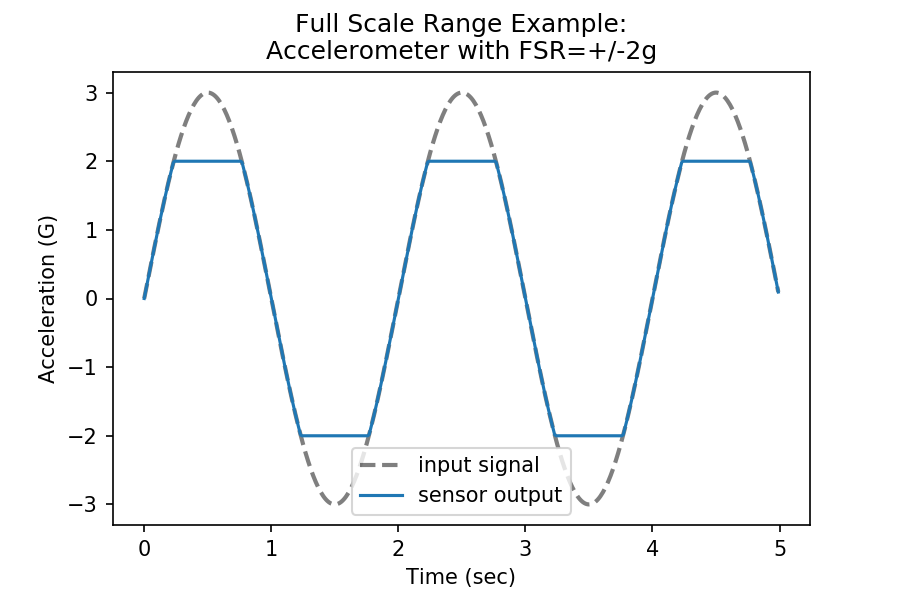
This is one of the more straight forward parameters which simply specifies the measurement limits for the sensor. The measurement range necessary for a given application will directly influence the requirements for operating range. Simply stated: stay in-bounds.
Specification
If possible, use an accurate sensor with a wide measurement range to measure the size of signals present in the application of interest. This will inform the operating range required to safely (e.g. 1.5 or 2x) capture all measurements of interest. Alternatively, a physics based model or simulation can furnish the same information.
Points to Consider
- A larger operating range implies a smaller sensor resolution. This is because sensors have a fixed number of bits for the analog-to-digital (A2D) converter, for example 16 or 24 bit. Choosing an overly conservative sensor operating range comes at the cost of lost resolution (i.e. reduced sensitivity).
- Typically sensor non-linearity errors are worse near the limits. Therefore, operating near the limits of the range creates exposure to greater non-linearity errors.
- The different geometric directions on the same application will often impose vastly different operating range requirements. Imagine a rail-based vehicle: forward acceleration will span a significantly larger range than any lateral acceleration.
- In addition to the aforementioned connection to sensitivity, the choice of operating range is also connected to the output data rate, current consumption, and bandwidth.
- Consider that vibration and other types of shocks and impacts will add to the range required in a given application. These may be considered as extraneous signals but in some cases they may become the driving factor in selecting output data rate, bandwidth, and FSR.
Final Thoughts
Ultimately the operating range specification is easy to evaluate and the choice is binary. This parameter, in and of itself, has little impact on the final system accuracy.
Simulation Example